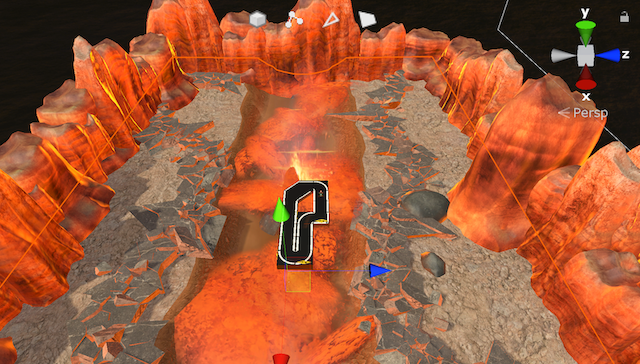
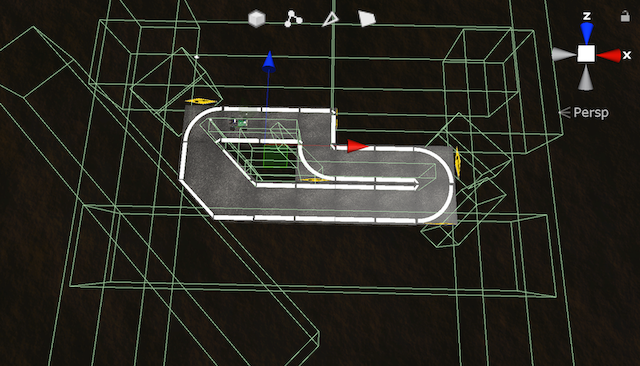
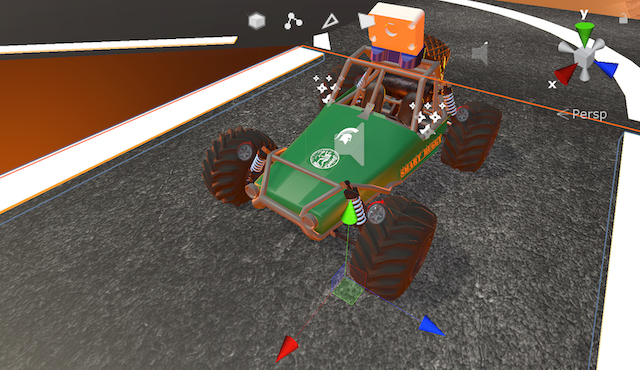
This is an interdisciplinary project and a collaboration between National Technical University of Athens (NTUA) and Michigan State University (MSU). The above mini-game features a virtual buggy that players can drive around a track. At the same time, this is a powerful research tool getting samples on driver’s behavior (speed, wheel angle) along with specific screenshots that simulate a real buggy’s camera. After sampling phase is completed, the data is successfully used to train a real buggy at MSU drive itself. Along with human driving behavior a Unity driving AI is created using Ray-casting cameras and invisible colliders. This way, we managed to have an AI-to-AI training.
Made with:
Publications:
1) Pappas*, J. E. Siegel*, K. Politopoulos, and Y. Sun, “A Gamified Simulator and Physical Platform for Self-Driving Algorithm Training and Validation,” Electronics, vol. 10, no. 9. 2021. *These authors contributed equally
2) J. E. Siegel*, G. Pappas*, K. Politopoulos, and Y. Sun, “A Gamified Simulator and Physical Platform for Self-Driving Algorithm Training and Validation,” arXiv preprint arXiv:1911.07759
Collaboration:
Awards:
“Thomaidion” Award 2021 (NTUA)
for the publication “A Gamified Simulator and Physical Platform for Self-Driving Algorithm Training and Validation”